# Reinforcement Learning Notes: State and Action Values
# 1. State Value / State Value Function
vπ(s)=E[Gt∣St=s]
- The state value function vπ(s) represents the expected discounted return when starting in state s and following policy π.
- Core Concept: Discounted return average upon a given policy.
- Deterministic Scenario: If the policy π(a∣s), transition probability p(s′∣s,a), and reward p(r∣s,a) are all deterministic, the State Value is identical to the Return.
# 2. Bellman Equation
The Bellman equation characterizes the relationship among the state-value functions of different states.
vπ(s)=a∑π(a∣s)[r∑p(r∣s,a)r+γs′∑p(s′∣s,a)vπ(s′)],∀s∈S
- π(a∣s) is a given policy, which assigned a probability for action a at state s.
- Solving the Bellman equation is called Policy Evaluation.
vπ=rπ+γPπvπ
- vπ=[vπ(s1),…,vπ(sn)]T is the value function at all states.
- rπ=[rπ(s1),…,rπ(sn)]T (Immediate reward under policy π)
- Calculation: rπ(s)=∑aπ(a∣s)∑rp(r∣s,a)r
- Pπ: State transition matrix under policy π.
# 3. Solving State Values (for a certain policy)
State values can be obtained through:
- Direct Solution: vπ=(I−γPπ)−1rπ
- Iterative Solution: vk+1=rπ+γPπvk, where subscript k represents iterate step.
# 4. Action Value
The action value function qπ(s,a) is the expected return starting from state s, taking action a, and following policy π.
qπ(s,a)=E[Gt∣St=s,At=a]
vπ(s)=a∑π(a∣s)qπ(s,a)
qπ(s,a)=r∑p(r∣s,a)r+γs′∑p(s′∣s,a)vπ(s′)
- Compare different actions and select the one with the maximum value (Greedy selection).
# Optimal Policy and Iterative Algorithms
# 1. Bellman Optimal Equation
An optimal policy π∗ is optimal if vπ∗(s)≥vπ(s) for all s and for any other policy π.
For all s∈S:
v(s)=πmaxa∑π(a∣s)[r∑p(r∣s,a)r+γs′∑p(s′∣s,a)v(s′)]=πmaxa∑π(a∣s)q(s,a)
- Given probability or system model: p(r∣s,a),p(s′∣s,a)
- Reward r
- Gamma γ
v=πmax(rπ+γPπv)
The optimal solution is a deterministic greedy policy:
- π∗(a∣s)=1 if a=a∗, else 0.
- a∗=argmaxaq(s,a).
f(v):=πmax(rπ+γPπv)
v=f(v)
where
[f(v)]s=πmaxa∑π(a∣s)q(s,a),s∈S
# 2. Contraction Mapping Theorem
A fixed-point problem: v=f(v).
- Theorem: If f is a contraction mapping
∣∣f(x1)−f(x2)∣∣≤γ∣∣x1−x2∣∣, where γ∈(0,1)
, then a unique fixed point x∗ exists.
- Algorithm: The sequence xk+1=f(xk) converges to x∗, when k→∞.
- Application: f(v)=v in RL is a contraction mapping fix point problem.
# 3. Value Iteration (VI) Algorithm
vk+1=f(vk)=πmax(rπ+γPπvk)
- Step 1 Policy update: πk+1=argmaxπ(rπ+γPπvk). Use current vk select action that maximize qk(s,a)
- Step 2: vk+1=rπk+1+γPπk+1vk.
- Note: vk is not the true state value of the intermediate policy. Since vk does not satisfy Bellman equation.
- Step 3: Stop iteration when vk changes below the threshold.
q-table explicit expression of q(s,a), list all states and actions on a matrix.
# 4. Policy Iteration (PI) Algorithm
- Step 0: Initial random π0
- Step 1: Policy Evaluation (PE): Solve
vπk=rπk+γPπkvπk.
Closed form: vπk=(I−γPπk)−1rπk
Iterative: v(j+1)=r+γPv(j)
- Step 2: Policy Improvement (PI): πk+1=argmaxπ(rπ+γPπvπk).
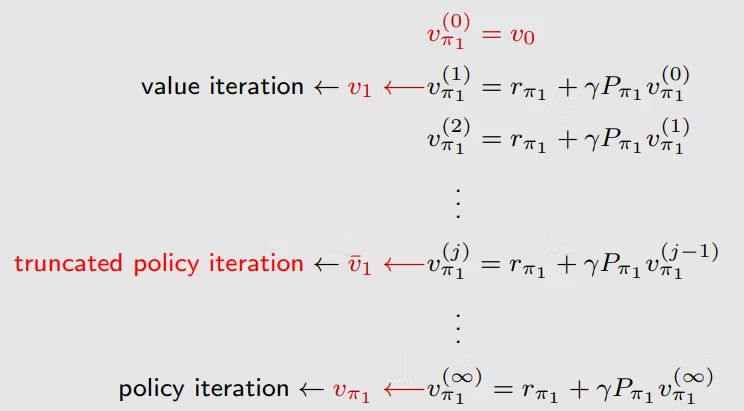
# 5. Comparison: VI and PI
When solving for the value function:
- Value Iteration: Only 1 step of evaluation (j=1) before updating π.
- Truncated PI: j steps of evaluation.
- Policy Iteration: Full evaluation (j→∞) before updating π.